{kind=link}

Brandon Lai needs to construct a humanoid robotic. He began with the higher physique and rapidly realized that off-the-shelf actuators would both price an excessive amount of or restrict what the machine may do. So he got down to design and construct his personal. This newest model marks his second critical try, and it already produces usable torque in testing. He targeted on a shoulder actuator sized for a roughly four-kilogram arm about half a meter lengthy. The targets have been easy. Peak torque wanted to achieve round 20 newton-meters. Output velocity ought to fall between 40 and 60 revolutions per minute. The unit additionally needed to run constantly for greater than an hour. Maintaining the associated fee close to $150 per actuator would make it sensible for different builders to repeat or adapt.
The fundamental design is predicated on the MIT analysis into Direct-Drive Actuators, which use a robust motor and really minimal gearing to take care of the joint feeling snappy whereas additionally permitting it to be back-driven by exterior forces. Brandon admired the spirit of that method, however selected to make one important adjustment. He eliminated the planetary gearbox and changed it with a cycloidal association. The cycloidal reducer guarantees extra torque capability in a small house and considerably diminished slop between the enter and output.
The motor was constructed round a standard 110-size stator core from Eagle Energy, which Brandon wound fully by hand. He was in a position to get 254 twists of copper wire onto the core, divided into six totally different strands, every with six loops across the tooth. The parallel strands permit the motor to face up to way more present whereas sustaining a voltage that the majority controllers can deal with. By winding it by hand, he had full management over {the electrical} qualities, deciding what it might be like reasonably of getting to go along with what got here pre-wound.
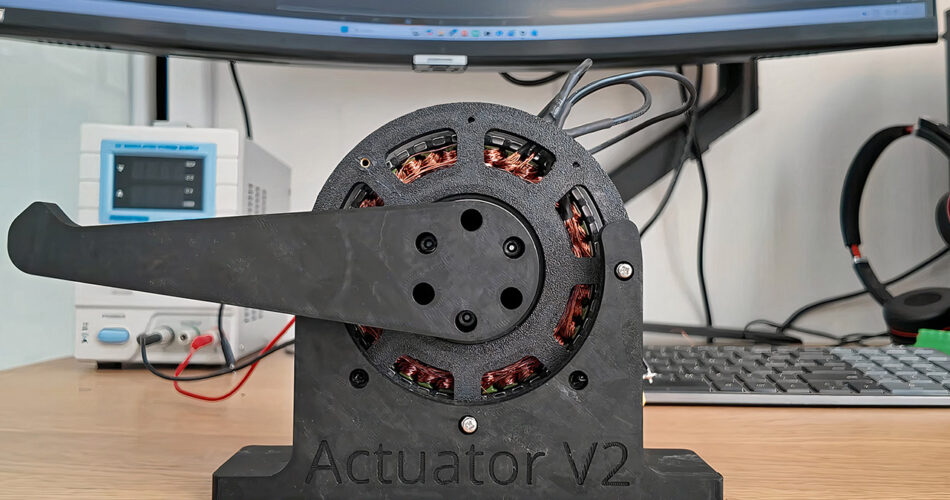
The spinning outer ingredient of the motor, often called the bell, must be machined with very exact tolerances. Brandon forwarded the specs to an internet CNC service, they usually returned with a easy stainless-steel cylinder able to be fitted with a hoop of highly effective neodymium magnets. Brandon set the magnets in an alternating north-south association and sealed them with epoxy after utilizing a easy alignment gadget. The completed bell is a mix magnetic rotor and first structural shaft that transmits torque to the output.
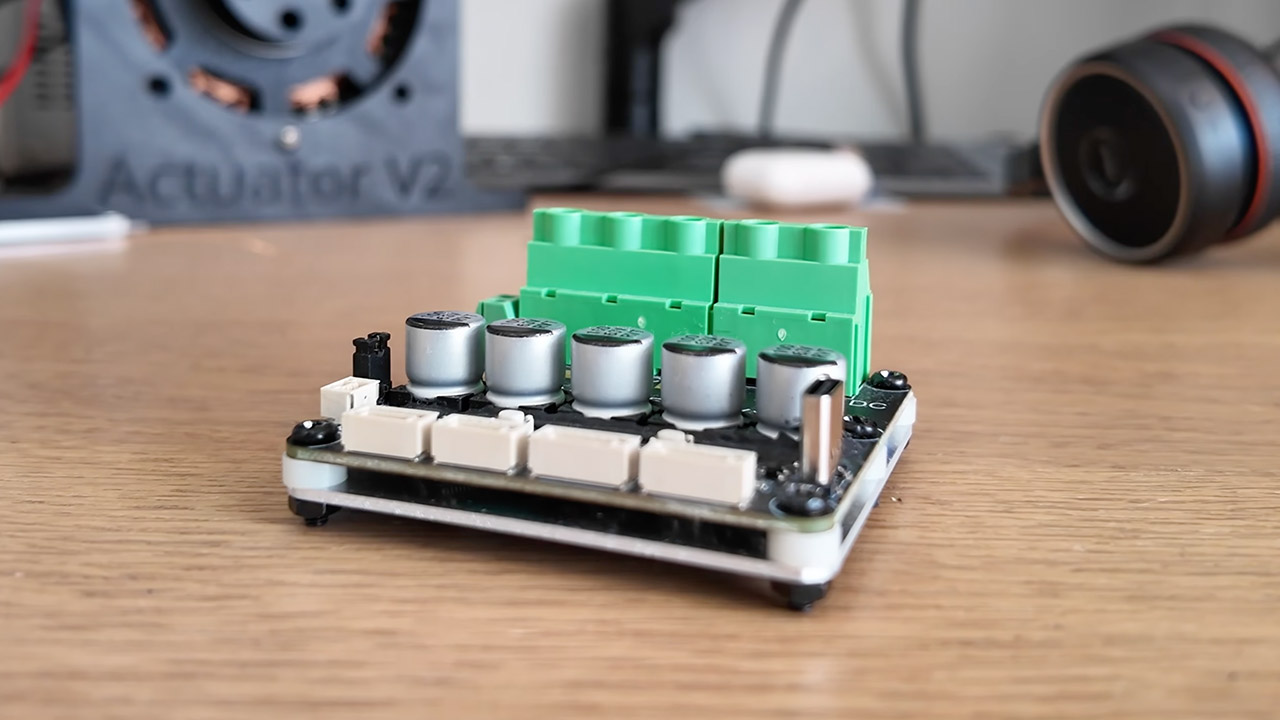
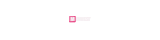
What we’re speaking about right here is the discount and torque multiplication that happens contained in the cycloidal gearbox. We get a ten:1 ratio from having an eccentric enter flip a lobed disc previous eleven fastened pins. The output hyperlinks on to the robotic arm. Brandon designed and printed the gearbox elements for this prototype. This allowed him to make changes on the fly all through improvement, however it will definitely revealed its limitations when it comes to precision. As soon as he acquired all the components, such because the motor, bell, and gearbox, he bolted them collectively round a brushless controller. Initially, he examined a customized printed circuit board that he had designed. Sadly, one built-in circuit instantly shorted out and started to smoke. So he swapped in a ready-made Makerbase X-Drive board, which continued to run the motor with out challenge.

Testing went from the lab to a easy load rig. Brandon fitted a 150mm lever arm to the output shaft and hung a 5kg weight from its finish. This generates a torque demand of round 7 newton meters. The ability got here from a bench provide with present limitations in place. Underneath these circumstances, the actuator was in a position to assist and transfer the load satisfactorily, delivering roughly 7 newton meters of torque. If we had a provide that would ship a bigger present, we’d nearly actually be capable to get much more out of it as a result of torque scales on to accessible amperage.
[Source]
Source link