
{kind=link}

Aaed Musa has spent years poring over his work on robot dogs, experimenting with one mission after one other. For his senior design mission in mechanical engineering, he assembled a small group to construct CARA 2.0, a machine that travels much more easily and reliably than something he has beforehand created. The group set some quite powerful targets: maintain your complete price round $1,000, maintain the burden underneath twenty kilos, and make sure that each single part was engineered to face up to repeated use with out breaking up.
The unique CARA had a severe flaw: the joints have been powered by cumbersome capstan drives utilizing ropes and pulleys. Though these have been initially cheaper than common gears, they have been finally inadequate for the duty at hand. Musa and his colleagues determined to take a step again, rethink the actuators, and see if they might provide you with an improved answer. They picked up some cheap brushless motors initially made for drones, disassembled them, and rebuilt the coils with extra wire turns, this time within the type of a star sample. That resulted in a severely spectacular tripled torque with out including any further weight or bulk. The completed actuators had a bit controller and a nifty little 9.6 to 1 capstan discount, and so they might produce a shocking 12 newton-meters of peak torque for roughly $80. Throughout testing, one motor continued to run for greater than 1000 hours with little put on.
Sale

Bambu Lab A1 mini 3D Printer + LED Lamp Kit, Set Up in 20 Mins, High Speed & Precision, Full-Auto…
- A1 mini + LED Lamp Equipment for Useful Mild Tasks: Bambu Lab A1 mini + LED Lamp Equipment allows you to create illuminated fashions. Merely print appropriate…
- Excessive-Velocity Precision: Expertise unparalleled pace and precision with the Bambu Lab A1 Mini 3D Printer. With a powerful acceleration of…
- Multi-Colour Printing with AMS lite: Unlock your creativity with vibrant and multi-colored 3D prints. The Bambu Lab A1 Mini 3D printers make…
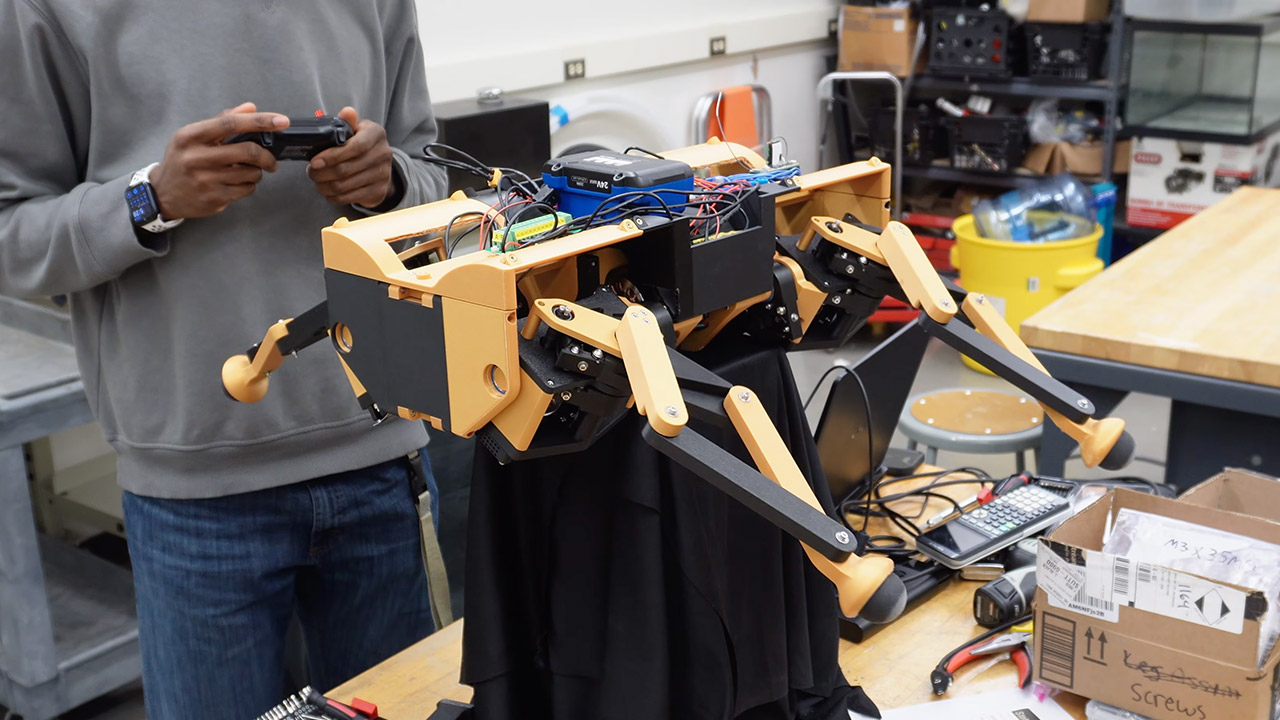
The legs acquired simply as a lot consideration because the actuators, as a result of earlier variations featured a five-bar linkage that appeared completely symmetrical however wasn’t, because the robotic saved sliding to the left anytime it tried to stroll. So the group started from recent, redrew the lot to make the back and front legs the identical, after which double-checked that the left and proper pairs have been appropriately mirrored. They changed the printed ft with squash balls, which offered a significantly larger grip on quite a lot of surfaces and a few pure give. Inverse kinematics sorted out the foot location, and cycloid trajectories offered the robotic brief, fast steps that allowed it to speed up easily. In consequence, throughout testing, scientists have been capable of persuade the robotic to stroll straight, transfer sideways, spin round in circles, crouch, and even leap 4.5 inches into the air.

After they started making some elementary materials choices, the burden merely dropped off. They changed the costly carbon fiber tubes with some extra low cost three-dimensionally printed PLA parts. Electronics have been all packaged collectively in a single field on high, which improved the robotic’s steadiness and diminished wiring. They put in a 24 volt battery pack with 3 amp-hours, which sits low and middle, offering roughly an hour of operation whereas remaining light-weight at 18.2 kilos. The completed robotic measures 20.5 inches from nostril to tail, 13.9 inches throughout, and 16.8 inches tall when it’s standing up straight.

There have been a couple of unfastened ends to tie up on the software program facet. Since joints do not need their very own precise place trackers, present spikes on a motor merely sign it to maintain going till it reaches its mechanical restrict. When the robotic first boots up, the preliminary startup interval seems to be a really regular stretch. Your complete system is coordinated by a Teensy microcontroller by way of a accurately wired CAN bus, which feeds knowledge from a 9-axis IMU to alter the robotic’s middle of mass whereas it strikes, which is crucial in dynamic settings. Initially, early iterations of the stroll merely fell aside on hills, however the scientists have been capable of repair this by making some trig-based changes to maintain the robotic secure even when the bottom was at an odd angle.
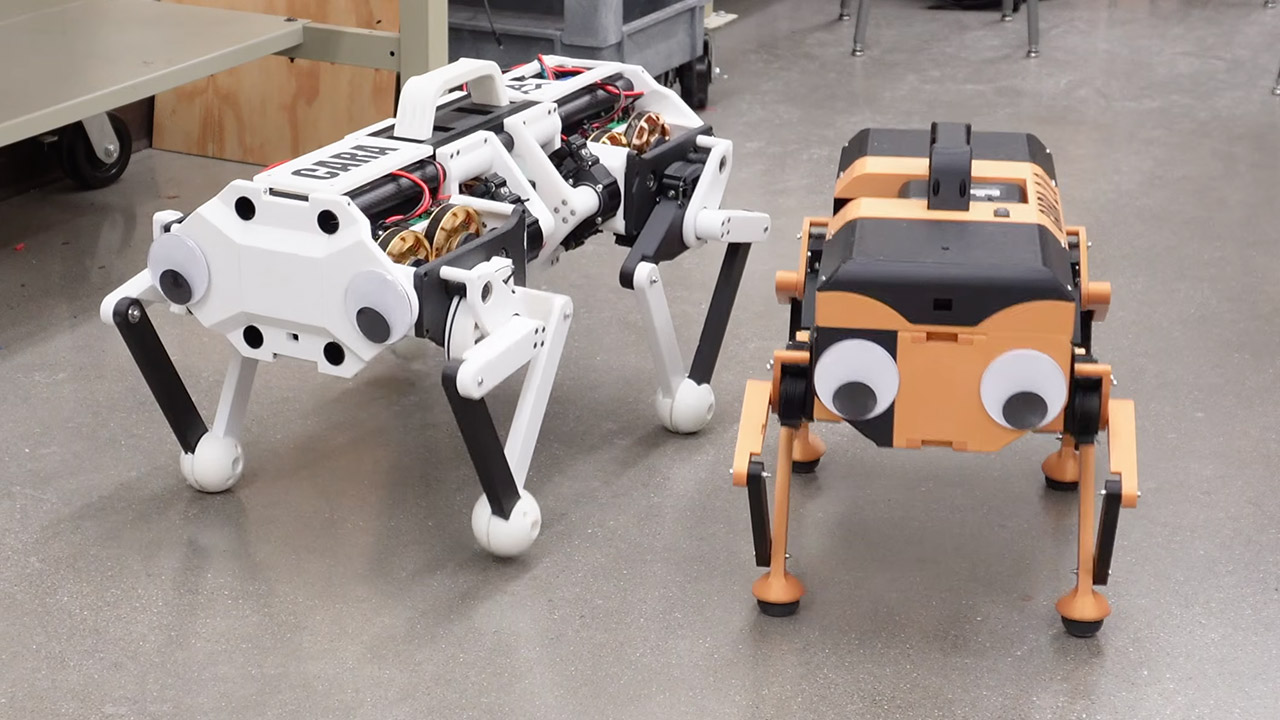
The newest iteration, CARA 2.0, can now journey at 1.8 ft per second, carry a 15-pound load, and stay upright over uneven terrain. Sidewalks, lawns, and modest obstacles now not trigger it to return to a halt. The homing sequence, squash balls on its ft, and upgraded motors all work collectively to supply the robotic with a clean, purposeful motion quite than that jerky, unstable impact.
[Source]
Source link