{kind=link}
![]()
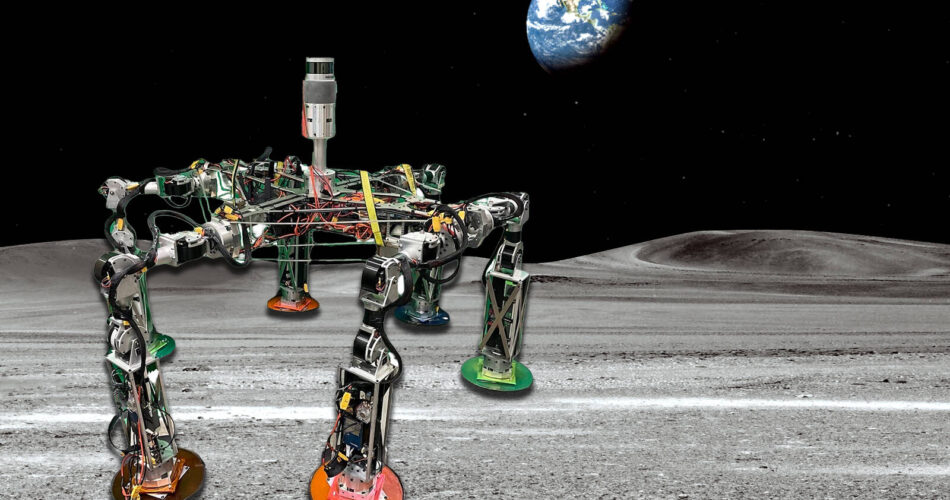
We’ll want plenty of robots to deal with harmful duties as soon as we get to the Moon, and a group from the Massachusetts Institute of Know-how is proposing an answer: Modular, wheel-free strolling robots constituted of a bunch of reconfigurable components.
The Strolling Oligomeric (Greek for “a number of components”) Robotic Mobility System, or WORMS, consists of three classes of components: The “worms” themselves, robotic limbs designed to articulate like an earthworm; “species” modules that give the system totally different capabilities, like LIDAR mapping; and equipment that allow the unit to deal with totally different environments, resembling specialised ft for various kinds of lunar regolith.
WORMS may reduce robotic cupboard space whereas on the Moon, Mars or past, stated the venture’s chief, George Lordos, a PhD candidate and teacher at MIT’s Division of Aeronautics and Astronautics. In his thoughts, WORMS may all dwell in a pleasant, compact house like flat-packed IKEA furnishings whereas awaiting use.
“Astronauts may go into the shed, choose the worms they want, together with the precise sneakers, physique, sensors and instruments, they usually may snap all the pieces collectively, then disassemble it to make a brand new one. The design is versatile, sustainable, and cost-effective,” Lordos said.
Taking a cue from nature
Lordos and his group first conceived of WORMS in 2022 as a part of NASA’s Breakthrough, Innovating and Sport-Altering (BIG) concept problem. The theme of final 12 months’s occasion was to design wheel-free robots that may be cell in varied excessive terrain environments, and Lordos’ group ended up a finalist, in addition to profitable an award for finest technical paper.
The WORMS group most lately offered its research on WORMS at IEEE’s annual Aerospace Convention, and once more received an award for finest paper.
As a part of the idea stage, Lordos’ group took cues from 4 totally different animals: spiders; mountain-climbing animals like goats; oxen; and elephants. All 4 classes have totally different configurations and specialised functions that could possibly be quickly assembled from a primary set of components.
The “spider”, for instance, would largely include sensor arms for analyzing lava tubes and sub-surface environments, and could be tethered to a robotic on the floor for energy. Mountain-climbing WORMS could possibly be outfitted with a limb that might anchor itself to the rock to permit for tethered descent, and likewise may function a top-of-the-hill anchor for oxen hauling heavy masses up inclines. “Elephants” are designed to tether to one another for help whereas additionally carrying heavy masses over tough terrain.
Different attainable “species” constructed utilizing WORMS could possibly be battery chargers that function a waystation for roving bots, rescue robots capable of carry a human or a bit of broken tools and robots outfitted with drill arms for sampling or drilling into the bottom to anchor.
Evolution is not fast
Attending to the purpose the place a military of modular strolling robots is doing the onerous work on the Moon goes to take a while, which Lordos and his group admit of their paper: The WORMS system is simply at NASA’s technological readiness stage (TRL) 4.
TRL 4 signifies that a part or subsystem of a venture has been validated in a laboratory atmosphere. Based on the paper, the group’s quick purpose appears to be to succeed in TRL 6, which suggests a system, subsystem or prototype has been demonstrated in a related atmosphere – on this case on the Moon.
“Although outfitted with applied sciences and constructed based on the system structure that displays this idea’s finish purpose, WORMS-1 [the six-legged concept bot the team has built] is finally a proof-of-concept prototype,” the MIT group stated within the paper.
The paper mentions a “proposed 2026 tech demonstration mission,” which suggests Lordos’ group solely has three years to get to TRL 6. In the event that they handle that feat, the proposed 2026 mission would see WORMS scout the completely shadowed area of a lunar crater. To take action, one WORMS bot will sit on the prime of the descent into the shadowed area to spool cables all the way down to a recharging robotic, which is able to provide energy for roving WORMS.

The proposed PSR WORMS demonstration in 2026
It should take plenty of work to get there, although: The Common Interface Block the group designed to function the adaptor for all the varied WORMS modules wants a redesign, because the locking mechanism used had already begun to deteriorate throughout testing. The WORMS’ motor wiring strategies must be reconsidered too, as they needed to be run externally on the check machine – one thing that will not fly within the chilly dustiness of house.
We requested the MIT group extra about its plans for WORMS’ future and can replace this story if we hear again.
Lunar exploration being as shut on the horizon as it’s, loads of totally different robotic ideas have been proposed, a few of that are designed to keep away from having to run cables everywhere in the lunar floor, just like the European House Company’s Daedalus or the College of Arizona’s “breadcrumb” mesh networking robots.
The large distinction between these designs and WORMS, nevertheless, is modularity and flexibility. With each pound valuable throughout an area launch, it would not be a shock if NASA seemed to WORMS and advised everybody else to assume alongside the identical quickly reconfigurable strains. ®
Source link