
{kind=link}
![]()

Engineering physics college students on the College of British Columbia completed a capstone mission that produced one thing uncommon in robotics. Their air hockey robotic realized each transfer inside a pc simulation after which stepped onto actual {hardware} able to face human opponents with no additional changes. The strategy bypassed the standard sluggish and dangerous course of of coaching instantly on bodily gear.
Over the course of round two years, a number of pupil groups labored collectively to finish the mission. Hudson Nock, Ian Hartley, and Mauro Ferraz led the final assault. They took over an early iteration of the {hardware} basis, with the first goal of narrowing the hole between digital coaching and real-world efficiency. The entire code and two fairly prolonged technical experiences at the moment are out there on GitHub for anybody who wish to learn all the pieces and perceive each choice they made.
For any automated system, air hockey presents some vital points. The desk floor isn’t utterly clean, the puck travels at excessive speeds, bounces differ relying on the place it hits the wood rails, and motor effectivity degrades when the facility provide voltage lowers beneath pressure. Standard physics fashions steadily fall wanting adequately capturing these variations in an effort to transition from simulation to actuality. As an alternative than relying simply on a generic engine, the UBC workforce selected to meticulously measure the precise {hardware} after which mimic its distinctive traits throughout the code.
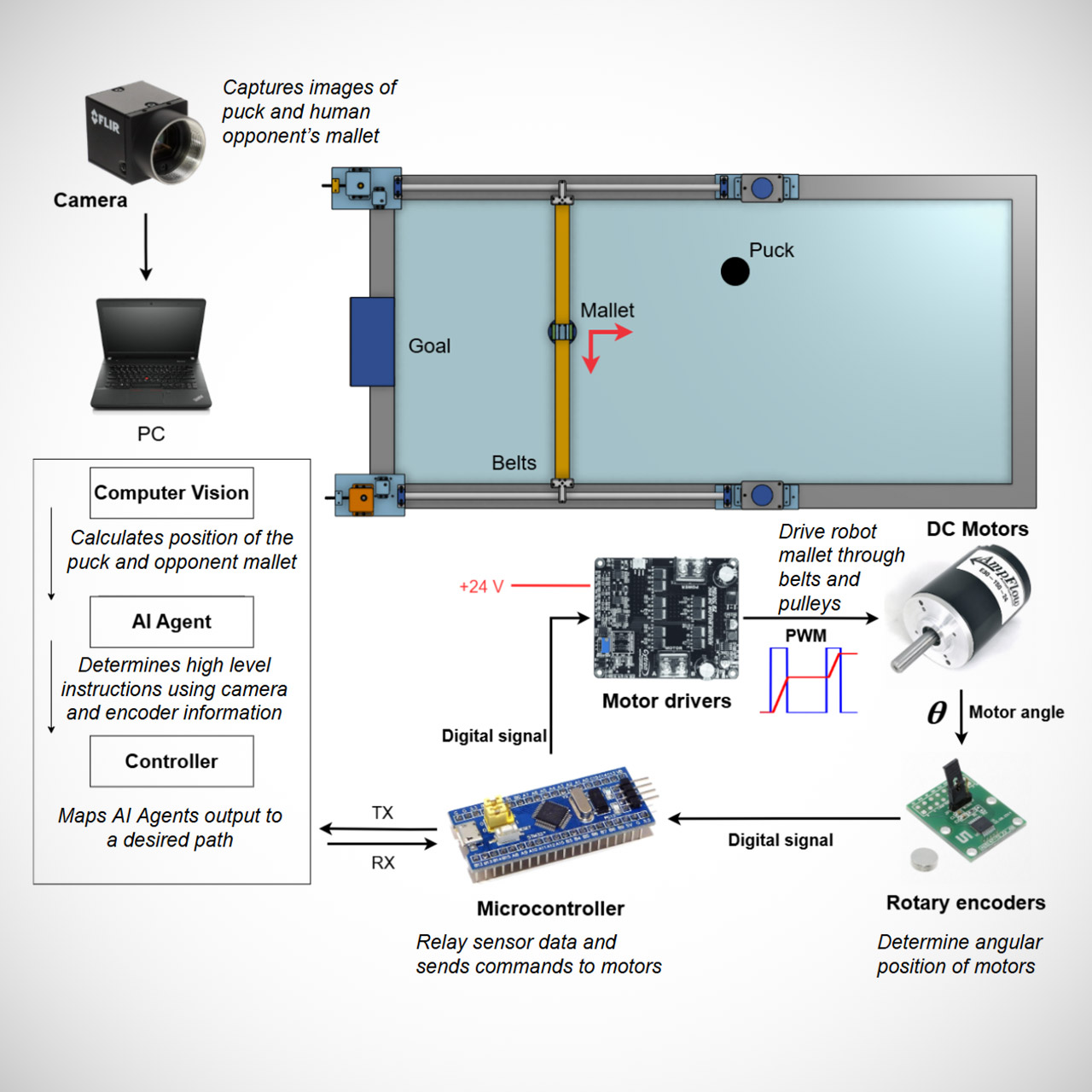
All of the sensing is managed by a single digicam above. The puck is marked with retroreflective tape, whereas the opposing mallet is marked with a singular marker. Even when the digicam makes use of very brief exposures of solely 100 microseconds to cease the motion, some brilliant LEDs near the lens make each objects seem exceptionally clear and crisp. As a way to preserve the place error down to almost exactly one millimeter over your entire floor, additionally they carried out some calibration work utilizing markers across the desk edges. That is fairly astounding given the little warping that may in any other case be a problem. A contour tracker can observe the puck all over even when the gantry obstructs the view. The human participant’s mallet could be discovered by the identical digicam at a scorching 120 frames per second.
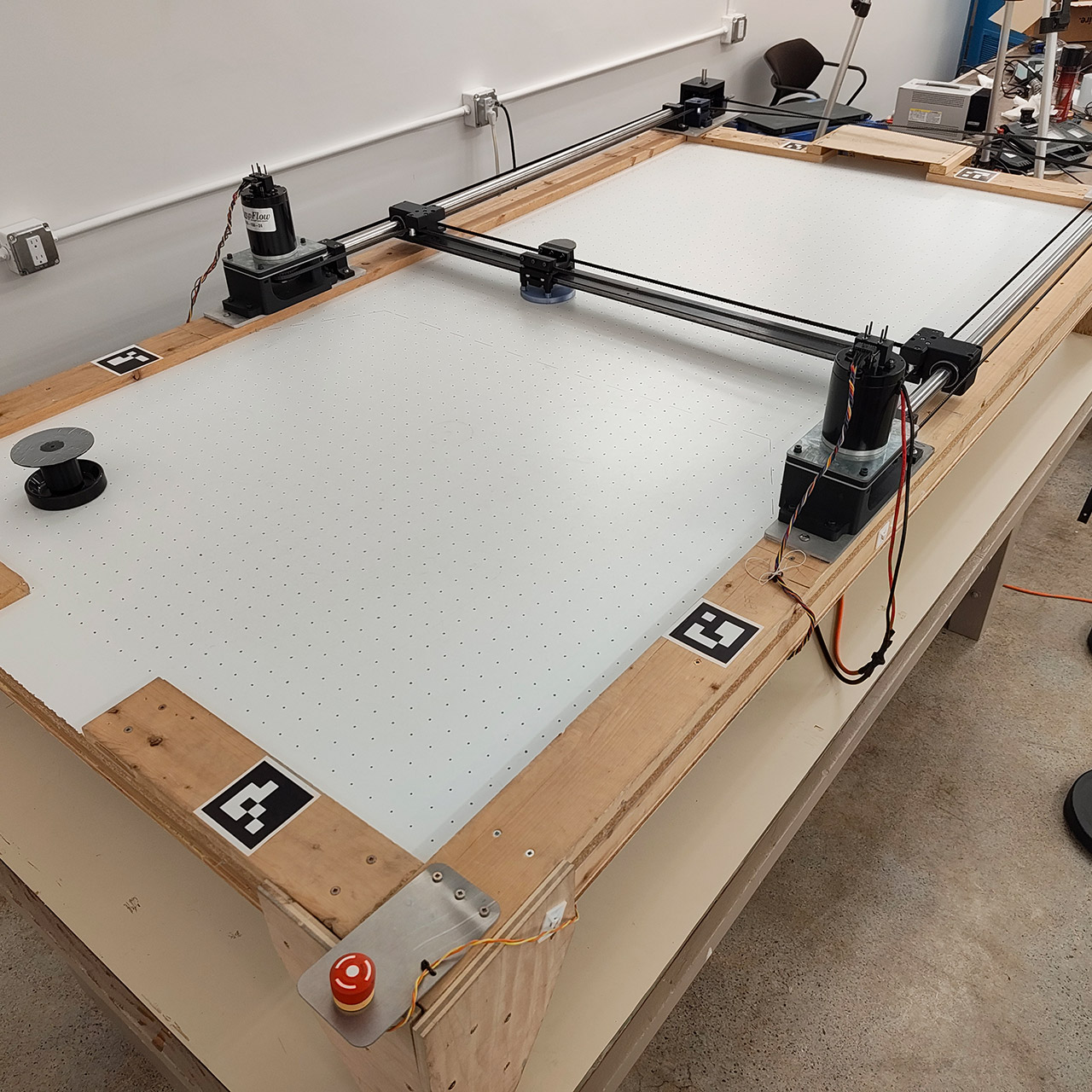
A Core XY gantry positioned excessive above one aspect of the desk generates motion. The mallet is guided by two belt-driven motors and an STM32 Blue Capsule microcontroller. Throughout system testing, the workforce went to the difficulty of figuring out how the mallet reacts to varied voltage alerts and recording all of it as a 3rd order switch features. They used a mixture of feedforward controls and PID suggestions to maintain the mallet on observe and nearly completely aimed. A large supercapacitor can be used to stabilize the voltage throughout fast accelerations.
Customized code designed for velocity and accuracy powers the simulation itself. The applying employs analytical options to simulate each puck and mallet movement, lowering the necessity for time-consuming numerical integration levels. They use an adaptive collision timing method to make sure that no impacts are missed. When the puck strikes the wood rails, a small neural community with solely 112 parameters kicks in, predicting each the departing velocity and angle, in addition to a measure of uncertainty. The simulator then attracts from that uncertainty distribution at random all through every run, so the training agent ought to count on barely unfair and noisy bounces fairly than flawless ones.
Vectorization permits a regular laptop computer to run hundreds of recreation situations on the identical time. On a standard Intel i5, your entire simulation runs roughly 230 instances quicker than actual time, which is fairly spectacular. That type of tempo makes it completely sensible to run intensive coaching periods. To account for points resembling digicam lag and management enter latency, the agent is given a state that features the latest puck and mallet motion over a wide range of delays. It then outputs the voltage parameters for the movement profile along with the meant remaining mallet place.
The Tender Actor Critic reinforcement studying method was used to coach networks with about 200,000 parameters. The squad took motion since self-play alone can lead to one-dimensional methods. After coaching, they only utilized the coverage to the precise controller with none additional fine-tuning in the true world, leading to some deviation. The spherical journey delays are all stored in sync whereas your entire system runs on a 60-Hz loop.
[Source]
Source link